С (R2): holding (х)(R2): ontable (х), clear (х), handempty (R2): holding (х)
R3: stack (х,у) - положить кубик на другой кубик
C(R3): holding (х) & clear (у)(R3): handempty, on (x,y), clear (x)(R3): holding (x), clear (y)4: unstack (x,y) - снять кубик с другою кубика
C(R4): handempty & on(x,y) & clear (x)(R4): holding (x), clear (y)(R4): handempty, on(x,y), clear (x)
Начальное состояние s0 и цель G изображены на рис.3.
Таким образом, цель G= {On (А,В) & On (В,С)}.
Поскольку цель G является составной, то STRIPS расщепляет её на отдельные компоненты - On (А,В) и On (В,С), которые помещаются в стек и удовлетворяются по очереди.
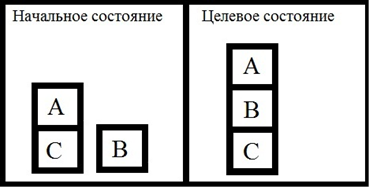
Рисунок 3 - Аномалия Суссмана
Положим, что On (А,В) наверху стека, тогда планировщик находит следующую последовательность правил для удовлетворения On (А,В):
UNSTACK(C,A), PUTDOWN(C), PICKUP(A), STACK (A,B).
Применяет найденную последовательность к состоянию So. Получается ситуация, изображённая на рис.4, в которой On (А,В) выполнима. Цель On (А,В) удаляется из стека целей. On (А.В) удовлетворено.
Далее, из ситуации на рисунке 4 , удовлетворяется следующая цель в стеке - On (В,С). В результате имеем: UNSTACK(C,A), PUTDOWN(C), PICKUP(A), STACK (A,B), UNSTACK(A.B). PUTDOWN(A) PICKUP(B), STACK (B.C).

Рисунок 4 - Удовлетворение первой цели
Применяем последовательность подчёркнутых правил. И, получаем ситуацию на рисунке 5. Цель On (В,С) удовлетворена и удаляется из стека. Однако цель Оn(А,В), удовлетворённая на предыдущем этапе, перестает быть выполнимой.
И, поэтому, теперь планировщик пытается из ситуации на рисунке 5 удовлетворить On (А,В). Это приводит к добавлению ещё двух правил к имеющейся последовательности.

Рисунок 5 - Удовлетворение второй цели
В результате получаем план:
(C,A), PUTDOWN(C),
PICKUP(A), STACK (A,B), UNSTACK(A,B), PUTDOWN(A), PICKUP(B),STACK (B,C), PICKUP(A), STACK (А.В)
Подчёркнутые правила применяются. Цель On (А,В) & On (В,С) достигается. План построен.
Однако существует другой план, содержащий меньше действий:
UNSTACK(C,A), PUTDOWN(C), PICKUP(B), STACK (B,C), PICKUP(A), STACK(A,B)
Рассмотрим вычислительную сложность задачи STRIPS-планирования.
Описание задачи классического планирования в терминах STRIPS допускается любым планировщиком. Поэтому рассмотрим вычислительную сложность задачи STRIPS-планирования [23,17, 22].
Далее будем рассматривать случай разрешимой задачи планирования, вычислительная сложность которой (таблица 1), варьируется от постоянного времени до EXPSPACE-полноты в зависимости от ограничений, накладываемых на язык домена, планирования Р.
Таблица 1 - Вычислительная сложность задачи планирования
|
предикаты не содержат функциональные символы |
не априорно |
есть |
есть/нет |
1 |
ExpSpase-полна |
NExpTime-полна |
|
нет |
есть |
2 |
NExpTime-полна |
NExpTime-полна | ||
|
нет |
3 |
ExpSpase-полна |
NExpTime-полна | |||
|
нет |
4 |
Pspace-полна |
PSpace-полна | |||
|
априорно |
есть |
есть/нет |
5 |
Pspace |
PSpace | |
|
нет |
есть |
6 |
NP |
NP | ||
|
нет |
7 |
P |
NP | |||
|
нет |
8 |
NLogSpace |
NP | |||
|
Все предикаты 0-местные |
не априорно |
есть |
есть/нет |
9 |
PSpace-полна |
PSpace-полна |
|
нет |
есть |
10 |
NP-полна |
NP-полна | ||
|
нет |
11 |
P |
NP-полна | |||
|
нет |
12 |
NLogSpace-полна |
NP-полна | |||
|
априорно |
есть/нет |
есть/нет |
13 |
постоянное время |
постоянное время |
Подбор очковой коррекции |
Закаливание организма |
Гигиена полости рта |