Хронология подходов интеллектуального планирования при классических допущениях
На рисунке 1. представлена хронология подходов к решению задачи интеллектуального планирования при классических допущениях.
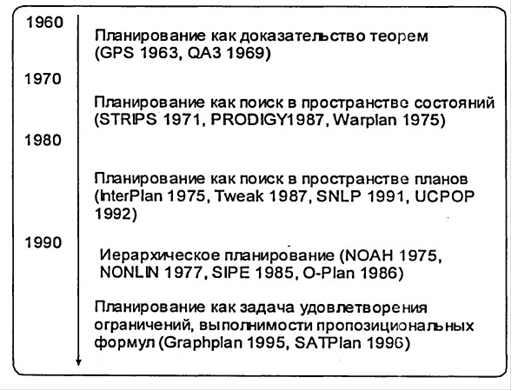
Рисунок 1 - Хронология подходов классического планирования
Начало исследованиям в области планирования положено работами [26,41,40, 25], в которых планирование рассматривалось как доказательство теорем.
Системам на основе доказательства теорем был присущ ряд недостатков. Наиболее существенными из них являлись: 1) крайне низкая производительность, 2) проблема фрейма.
Эти недостатки привели к созданию подходов, основанных на поиске в пространстве состояний [24, 49, 38,16].
Алгоритмы на основе поиска в пространстве состояний в некоторых случаях оказались негибкими, и в новом поколении методов задача планирования была сформулирована как поиск в пространстве частично-упорядоченных планов [20, 22, 34, 42].
Одновременно с развитием идеи частичных планов развивалась идея иерархического планирования [47, 46, 55], которое подразумевает создание планировщиком иерархии абстракций (подцелей). Это упрощает процедуру планирования - вначале создается план в общих чертах, затем выполняется детализация - спуск по иерархии. Это позволяет сосредочить вычислительные мощности на решении первостепенных задач. Иерархическое планирование также интересно тем, что лишь на основе этого подхода создано большинство реально работающих систем [51, 54].
Иерархическое планирование возможно как при поиске плана в пространстве состояний [46], так и при поиске планов в пространстве планов [47].
В начале 90-х годов, в связи с появлением высокопроизводительных алгоритмов решения задачи удовлетворения ограничений (CSP-задача), задачи проверки истинности в пропозициональной логике (SAT-задача), стала популярной постановка задачи планирования как CSP-задачи [17] и как SAT-задачи [31]. Это позволило значительно повысить скорость синтеза планов. Одновременно с этим появились работы, в которых задача планирования рассматривалась как задача целочисленного линейного программирования (ILP-задача) [33] или как задача построения бинарных диаграмм решений (BDD-задача) [48, 21].
Начиная с 1998 года, стали появляться первые планировщики, использующие эвристики для поиска плана [18, 27, 30, 44]. Конечно же, использование эвристик для решения задач не является свежей идеей. Но лишь недавно появились механизмы автоматизированного извлечения эвристик из описания домена планирования. В значительной степени, этому способствовало выделение некоторых свойств структур, используемых алгоритмами Graphplan и Satplan.
В разделах 1.2.3-1.2.6 будут подробнее рассмотрены некоторые подходы к решению задачи планирования при классических допущениях на примерах работы конкретных алгоритмов.
Планирование как доказательство теорем
Одним из примеров системы доказательства теорем, использовавшейся для решения задачи планирования, является система QA3 [26].
В системе QA3 одно множество утверждений использовалось для описания начального состояния, а другое - для описания эффектов действий. Чтобы следить за тем, какие факты являются истинными и в каком состоянии, в каждый предикат включаются переменные, отвечающие состоянию. Целевое условие описывалось формулой с переменной, связанной квантором существования.
Задача системы состоит в том, чтобы доказать существование состояния, в котором истинно целевое условие. В основе доказательства лежит метод резолюций [45].
Эксплуатация QA3 показала, что вывод в такой системе получается очень медленным.
Кроме того, для неё не существовало сколько-нибудь приемлемого решения проблемы фрейма [43]. Суть этой проблемы состоит в том, что действие может иметь нелокальный эффект, т.е., в общем случае, не ясно какие формулы, описывающие состояние системы, изменяются при применении действия. Это, приводило к тому, что в описание действия включались утверждения об изменении (не изменении) каждого факта, представленного в состоянии. Очевидно, что в сложных предметных областях описание эффектов действия значительно усложняется. Достаточно элегантное решение проблемы фрейма предложено в [7].
Поиск в пространстве состояний
Первым планировщиком, осуществляющим планирование в пространстве состояний, является STRIPS (STanforci Research Institute Problem Solver) [52].
STRIPS изначально разрабатывался для решения задачи формирования плана поведения робота, перемещающего предметы через множество помещений.
Подбор очковой коррекции |
Закаливание организма |
Гигиена полости рта |