Очевидно, что чем короче план, тем меньше ресурсов будет израсходовано на этапе исполнения плана. Таким образом, весьма желательным свойством некоторого гипотетического планировщика является исключение из рассмотрения последовательностей действий с бесполезными подпоследовательностями.
Кроме того, это свойство позволило бы существенно снизить нагрузку на вычислительную систему, осуществляющую планирование.
Приведём утверждение 1 сформулированное в [59].
Утверждение 1.
Минимальный план planÎSEQ не содержит бесполезной подпоследовательности действий.
Доказательство:Предположим, plan содержит бесполезную собственную подпоследовательность действий mseq. Удалим бесполезную подпоследовательность действий из plan: plan' =Remove(plan,mseq↻). Получившаяся последовательность plan' также является планом, однако, содержит меньшее количество действий, чем plan. То есть, предположение неверно. Следовательно, plan не содержит бесполезную последовательность действий. Утверждение доказано.
Приведём утверждение 2 описанное в [59].
Утверждение 2.
Существует план, не содержащий бесполезную подпоследовательность действий, и не являющийся минимальным.
Доказательство:Приведём один пример, доказывающий утверждение. Пример.
Пусть дано:
В домене планирования Р существуют действия-прототипы:![]() с эффектом eff(
с эффектом eff(![]() )={ f1, f2}; действие а2, с эффектом eff (а2)= { f1}; действие а3 с эффектом eff(a3)={f2}.
)={ f1, f2}; действие а2, с эффектом eff (а2)= { f1}; действие а3 с эффектом eff(a3)={f2}.
В домене планирования Р возможно существование прочих действий, но не имеющих в своём описании фактов f1, f2, f3.
Предположим теперь, что существуют:
) Два неизоморфных плана Plan1 и Р1аn2, не содержащие бесполезные подпоследовательности действий.
Plan1 и Plan2 содержат схожие множества взаимовлияний (согласий), то есть каждому согласию по некоторому факту f в Plan1 можно однозначно сопоставить согласие по факту f в Plan2.
В Plan1 имеется пара согласий cs11 и cs12, соответственно по фактам f1 и f2 - cs1 и cs2 расположены на одном интервале влияния.
В Plan2 имеется пара согласий cs21 и cs22, сходная соответственно с cs11и cs12.
Тогда, возможно, что в плане Plan1 в согласиях cs11 и cs12 левым членом является действие ![]() В то время как в плане Plan2 в согласиях cs21 и cs22 левыми членами являются, соответственно, действия
В то время как в плане Plan2 в согласиях cs21 и cs22 левыми членами являются, соответственно, действия ![]() и
и ![]() - Из этого ясно, что в схожих согласиях в различных планах, в общем случае, может участвовать различное количество действий. То есть Plan1 и Plan2 могут содержать различное количество действий, несмотря на схожее множество взаимовлияний. Следовательно, один из планов не является минимальным. Утверждение доказано.
- Из этого ясно, что в схожих согласиях в различных планах, в общем случае, может участвовать различное количество действий. То есть Plan1 и Plan2 могут содержать различное количество действий, несмотря на схожее множество взаимовлияний. Следовательно, один из планов не является минимальным. Утверждение доказано.
Планирование на основе преобразования взаимовлияний
Опишем алгоритм поиска планов в множестве SEQ, который использует понятие взаимовлияния действий в последовательности. Назовём его ITPA (interference transformation planning algorith).
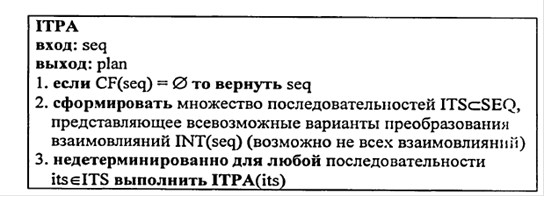
Рис. 10 - Алгоритм ITPA
Изначально на вход алгоритма ITPA подаётся начальная последовательность initÎSEQ, содержащая наименьшее количество действий. На выходе алгоритма ITPA получается план.
В основе алгоритма ITPA лежит переход от текущей, поданной на вход последовательности seq, к рассмотрению одной из последовательностей itsÎITS, в которой множество взаимовлияний INT(its) отличается (не подобно) от множества взаимовлияний INT(seq).
Подбор очковой коррекции |
Закаливание организма |
Гигиена полости рта |